Basic functionality
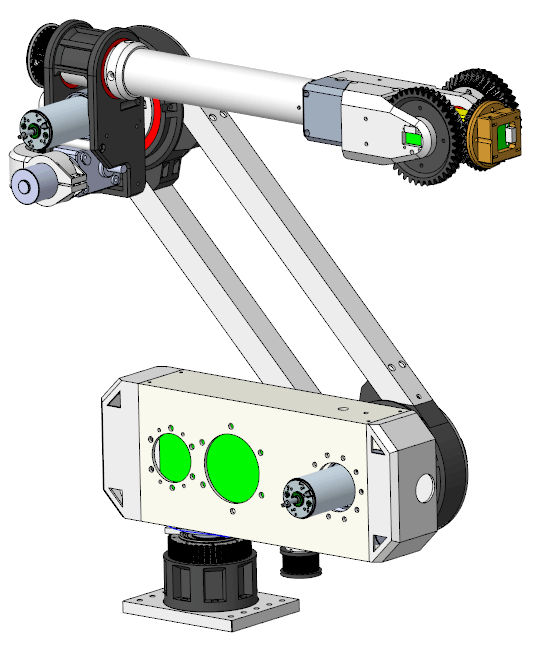
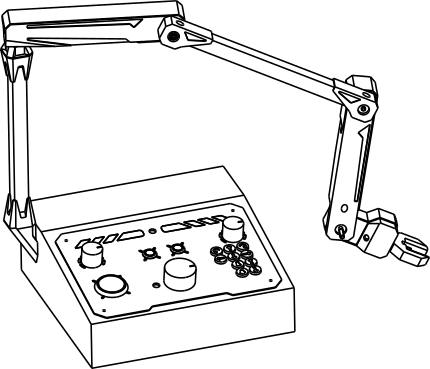
Versatile manipulator
The manipulator is equipped with six rotational degrees of freedom. Which allows it to pick up objects up to 2 kg in weight.
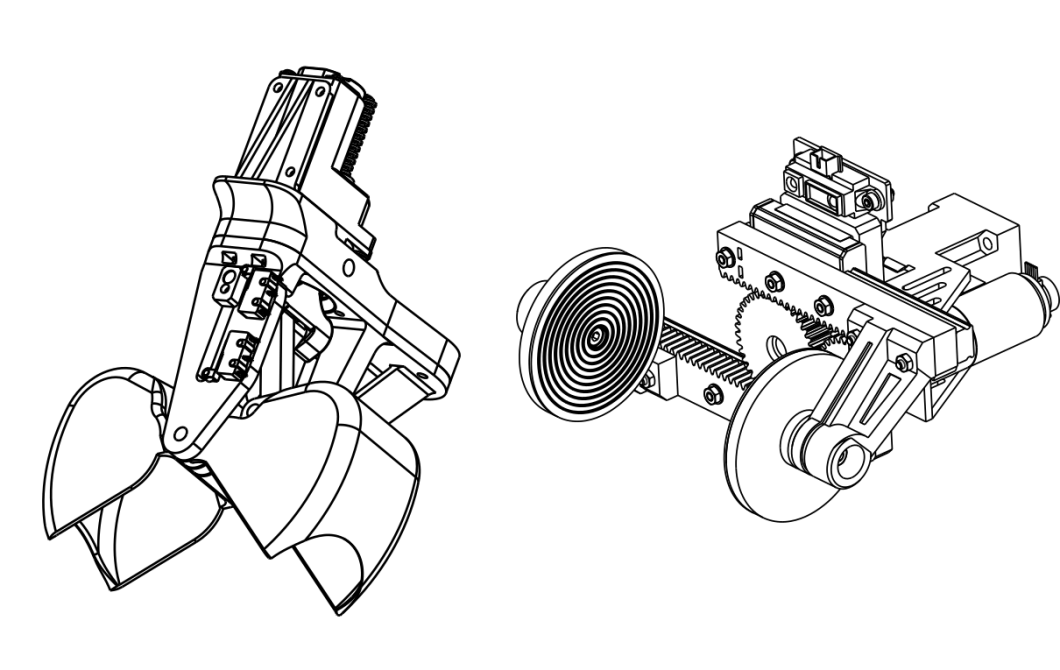
Expandable modules
Different tasks require different tools. Our rover is build to quickly change its capabilities with removable modules.
Sensors
The rover is equipped with a variety of instruments to sense its enviroment. Two cameras ensure the operator's awareness.
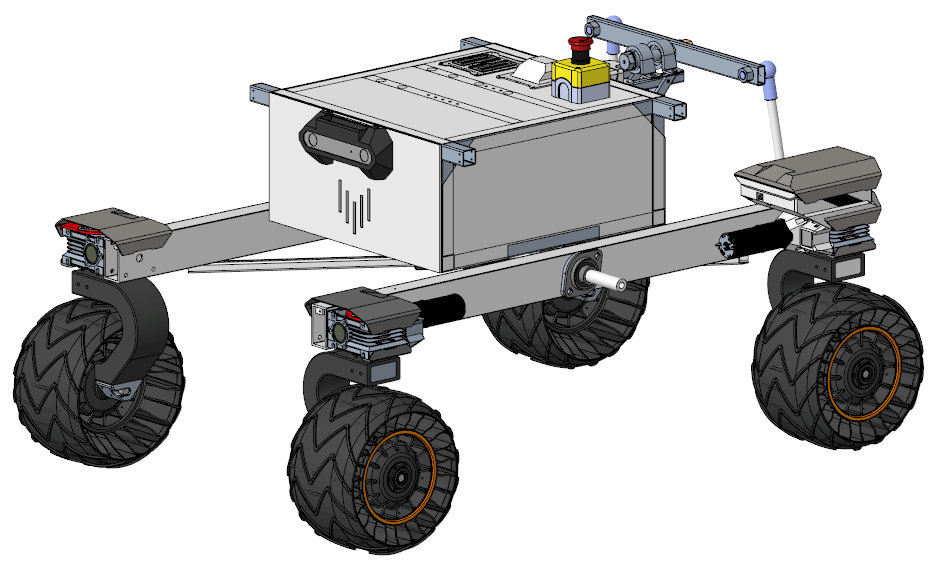
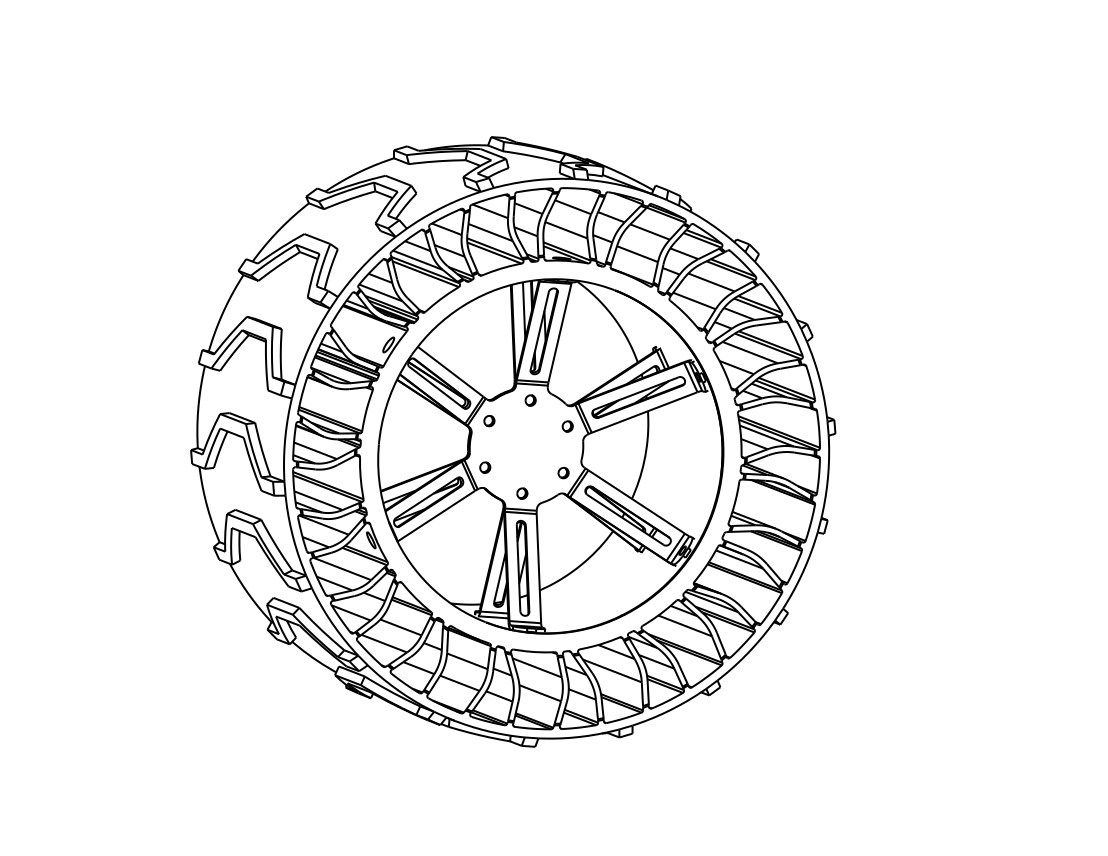
Undercarriage
The undercarriage has a rocker suspension that can overcome difficult terrain. Each wheel can turn individually, providing advantage over differential skid steering.